佐伯研究室 竹前諒也さん,坂田将哉さんが電気学会電子回路研究会にて発表しました。
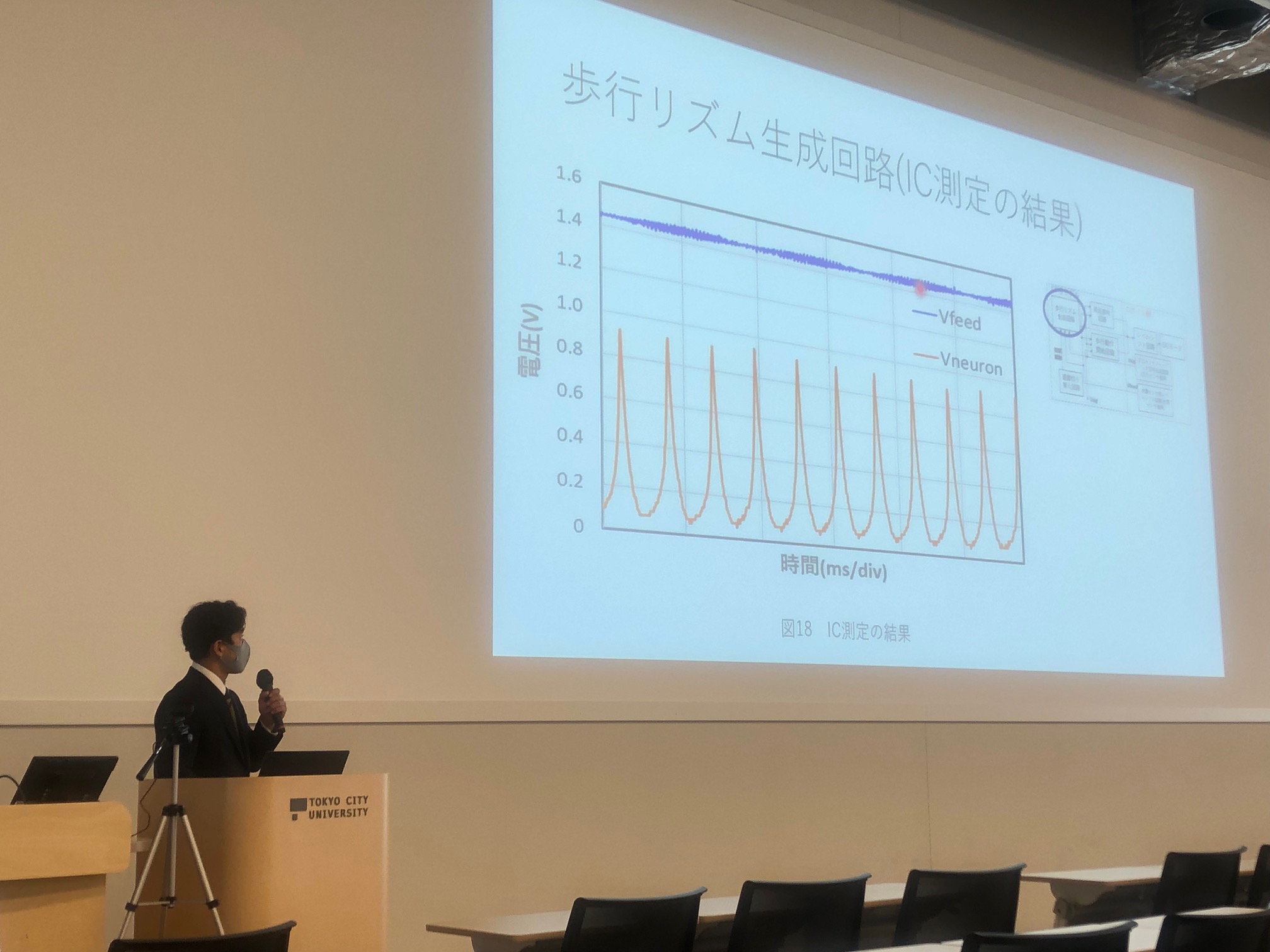
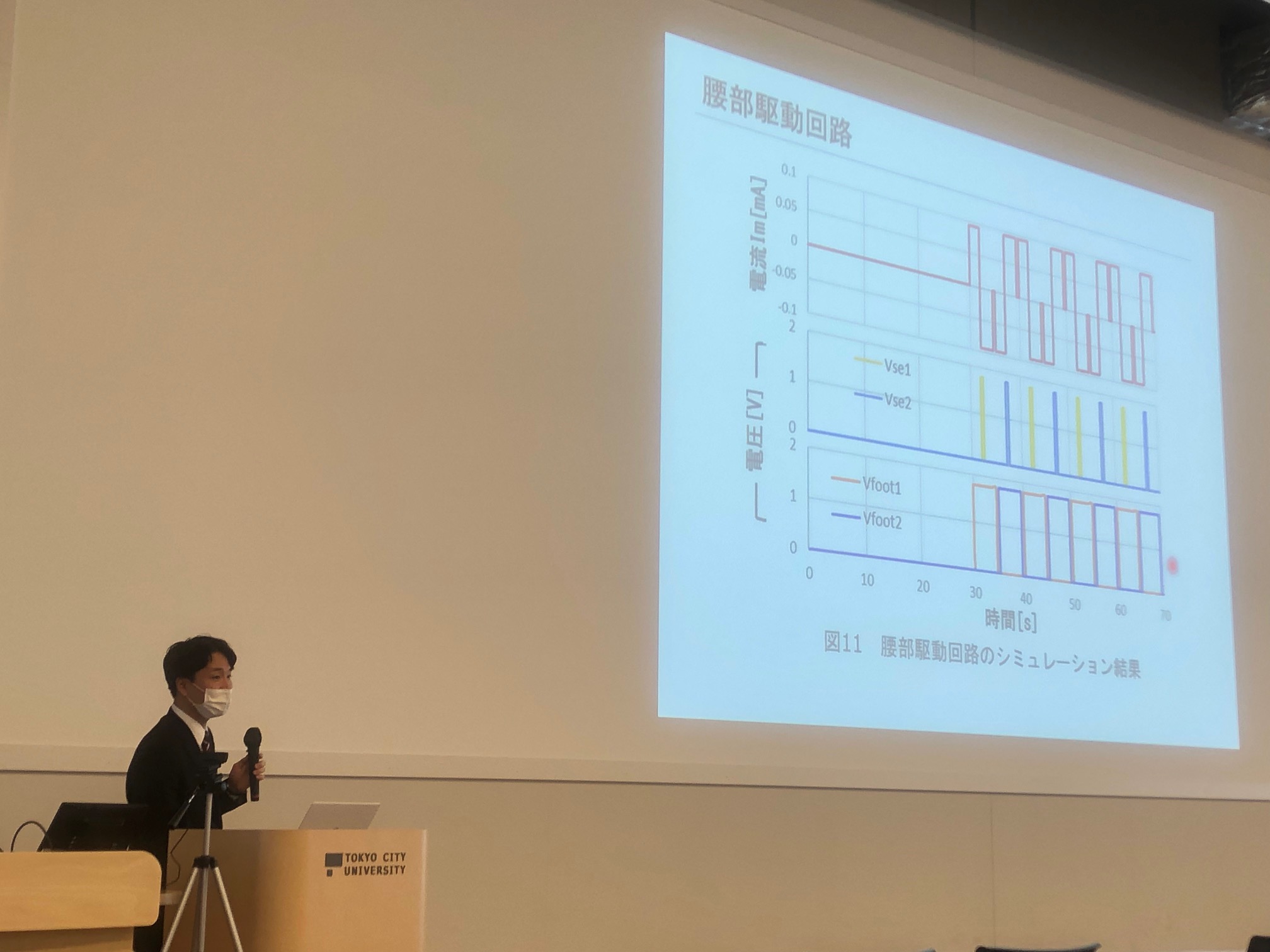
令和5年3月24日,東京都市大学世田谷キャンパスにてハイブリッド開催された電気学会電子回路研究会にて,佐伯研究室所属の博士前期課程1年 竹前諒也さんが「ハードウェアCPGモデルと連動可能な腰部駆動回路」(論文番号:ECT-23-024)と題し発表しました。また,学部4年 坂田将哉さんが「歩行リズム生成回路とセンサフィードバック信号を用いた歩行制御回路で構成したCPGモデル」(論文番号:ECT-23-023)と題し,研究成果を発表しました。いずれも,生物が歩行を行う際に,脚の動作順序やリズムを制御している神経回路網(Central Pattern Generator : CPG)のモデルに関する研究で,安定動作をするロボットの構築を目指し,四足歩行ロボット用腰部駆動回路に着目した研究と,視覚と触覚の情報を取り込み,歩行を制御する回路について検討した内容です。会場・オンライン上から多くの質問やコメントを頂き,有意義な議論を行うことができました。今後,益々の発展が期待されます。